DeepSeqSLAM: A Trainable CNN+RNN for Joint Global Description and Sequence-based Place Recognition
NeurIPS 2020 Workshop on Machine Learning for Autonomous Driving (ML4AD)
Abstract
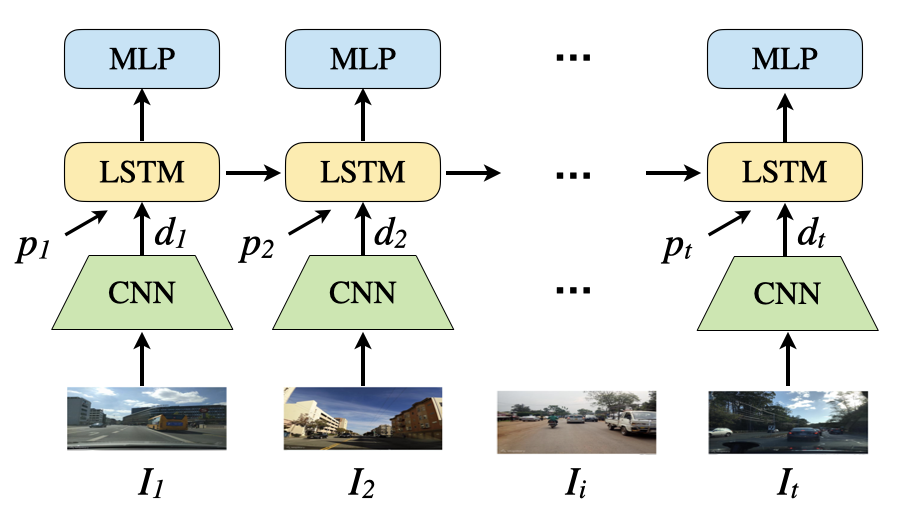
Sequence-based place recognition methods for all-weather navigation are well-known for producing state-of-the-art results under challenging day-night or summer-winter transitions. These systems, however, rely on complex handcrafted heuristics for sequential matching - which are applied on top of a pre-computed pairwise similarity matrix between reference and query image sequences of a single route - to further reduce false-positive rates compared to single-frame retrieval methods. As a result, performing multi-frame place recognition can be extremely slow for deployment on autonomous vehicles or evaluation on large datasets, and fail when using relatively short parameter values such as a sequence length of 2 frames. In this paper, we propose DeepSeqSLAM: a trainable CNN+RNN architecture for jointly learning visual and positional representations from a single monocular image sequence of a route. We demonstrate our approach on two large benchmark datasets, Nordland and Oxford RobotCar - recorded over 728 km and 10 km routes, respectively, each during 1 year with multiple seasons, weather, and lighting conditions. On Nordland, we compare our method to two state-of-the-art sequence-based methods across the entire route under summer-winter changes using a sequence length of 2 and show that our approach can get over 72% AUC compared to 27% AUC for Delta Descriptors and 2% AUC for SeqSLAM; while drastically reducing the deployment time from around 1 hour to 1 minute against both.Preprint: [PDF] ArXiv: [ABS] Code: [GitHub]
News
- (Mar 3, 2021) Update codebase Readme.md file.
- (Mar 1, 2021) Related manuscript on Sequential Place Learning is now available.
- (Oct 30, 2020) Paper DeepSeqSLAM accepted at the NeurIPS 2020 Workshop on ML4AD.
Relevant (Extended) Paper
- Sequential Place Learning: Heuristic-Free High-Performance Long-Term Place Recognition Marvin Chancán, Michael Milford
YouTube Video
SlidesLive @NeurIPS 2020
Bibtex
@article{chancan2021spl,
title = {Sequential Place Learning: Heuristic-Free High-Performance Long-Term Place Recognition},
author = {Marvin Chanc{\'a}n and Michael Milford},
journal = {arXiv preprint arXiv:2103.02074},
year = {2021}
}
@article{chancan2020deepseqslam,
title = {DeepSeqSLAM: A Trainable CNN+RNN for Joint Global Description and Sequence-based Place Recognition},
author = {Marvin Chanc{\'a}n and Michael Milford},
journal = {arXiv preprint arXiv:2011.08518},
year = {2020}
}