CityLearn: Diverse Real-World Environments for Sample-Efficient Navigation Policy Learning
2020 IEEE International Conference on Robotics and Automation (ICRA)
Abstract
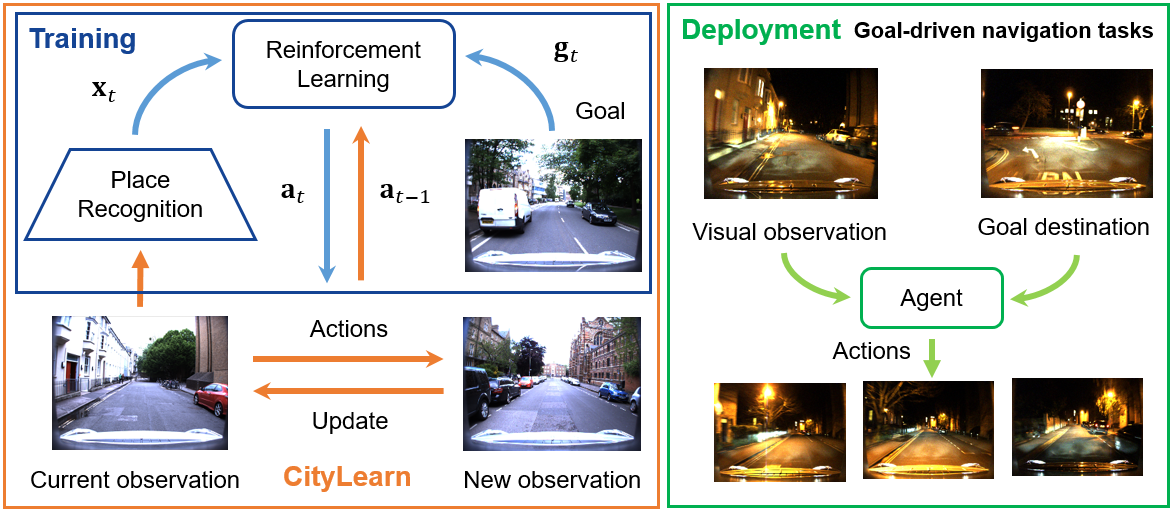
Visual navigation tasks in real world environments often require both self-motion and place recognition feedback. While deep reinforcement learning has shown success in solving these perception and decision-making problems in an end-toend manner, these algorithms require large amounts of experience to learn navigation policies from high-dimensional inputs, which is generally impractical for real robots due to sample complexity. In this paper, we address these problems with two main contributions.We first leverage place recognition and deep learning techniques combined with goal destination feedback to generate compact, bimodal images representations that can then be used to effectively learn control policies at kilometer scale from a small amount of experience. Second, we present an interactive and realistic framework, called CityLearn, that enables for the first time the training of navigation algorithms across city-sized, real-world environments with extreme environmental changes. CityLearn features over 10 benchmark real-world datasets often used in place recognition research with more than 100 recorded traversals and across 60 cities around the world. We evaluate our approach in two CityLearn environments where our navigation policy is trained using a single traversal. Results show our method can be over 2 orders of magnitude faster than when using raw images and can also generalize across extreme visual changes including day to night and summer to winter transitions.Preprint: [PDF] ArXiv: [ABS] Code: [GitHub] IEEE Xplore®: [Paper]
Video
Bibtex
@INPROCEEDINGS{chancan2020citylearn,
author={M. {Chanc\'an} and M. {Milford}},
booktitle={2020 IEEE International Conference on Robotics and Automation (ICRA)},
title={CityLearn: Diverse Real-World Environments for Sample-Efficient Navigation Policy Learning},
year={2020},
volume={},
number={},
pages={1697-1704}
}